NASA ARTEMIS
- NASA ARTEMIS Mentor: Alan Man
- Team Mentor: Harry Furey-Soper
- UW to host college students for NASA-funded lunar rover challenge: NASA’s Artemis Student Challenge
- Moonwalkers Team: Felicity Cundiff, Chris Copans, Vincent Leuzzi, Brandon Rousso, and Conrad M
- Key Role in UW NASA Artemis Lava Tube Challenge:
- Procured high-performance materials and components for the M01-Skylight-Entry rover.
- Integrated Raspberry Pi, camera, and sensor systems for real-time navigation and documentation.
- Collaborated cross-functionally to address technical challenges and ensure rover functionality.
- Ensured compliance with NASA’s mission objectives throughout the competition.
- Collaborated on rover design, 3D printing critical parts for terrain adaptability.
- Utilized CAD and Simulink for precise component design and integration.
- Resolved technical challenges during software integration for optimal performance.
- Optimized design for durability and operational reliability under lunar conditions.
- Designed and integrated Raspberry Pi and sensor systems for autonomous rover operations.
- Developed robust circuitry solutions for power management and telemetry.
- Implemented redundancy strategies to ensure mission-critical reliability.
- Adhered to NASA safety and operational standards during system development.
- Developed control algorithms using Python and C++ for rover navigation and operation.
- Optimized software performance for real-time data processing and decision-making.
- Integrated sensor systems for enhanced perception and environmental awareness.
- Developed graphical user interfaces for rover control and telemetry monitoring.
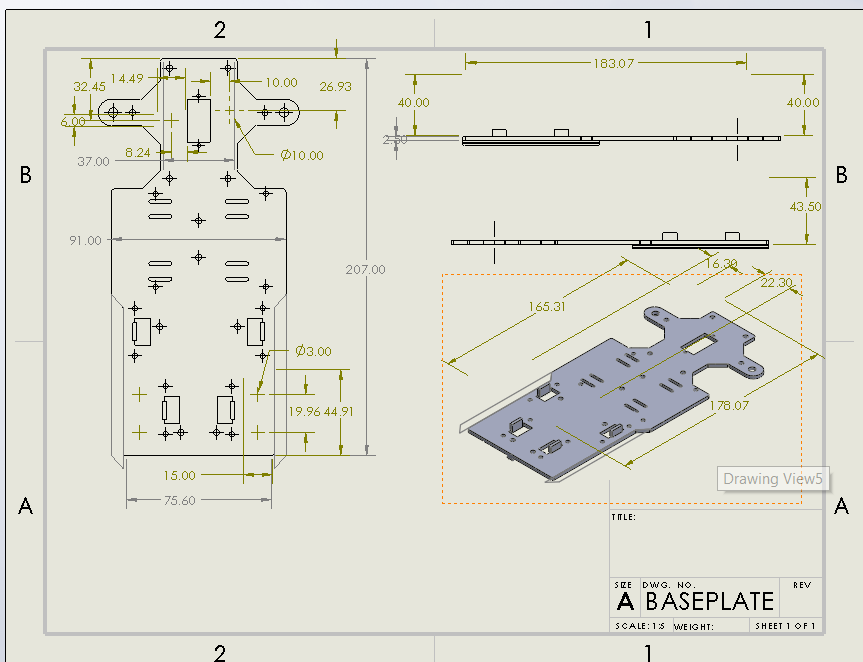
- Designed and simulated rover chassis and frame structures for durability and performance.
- Utilized lightweight materials and additive manufacturing techniques for weight efficiency.
- Resolved mechanical design challenges to ensure robust performance in lunar environments.
- Collaborated closely with team members to integrate mechanical components seamlessly.
Summary:
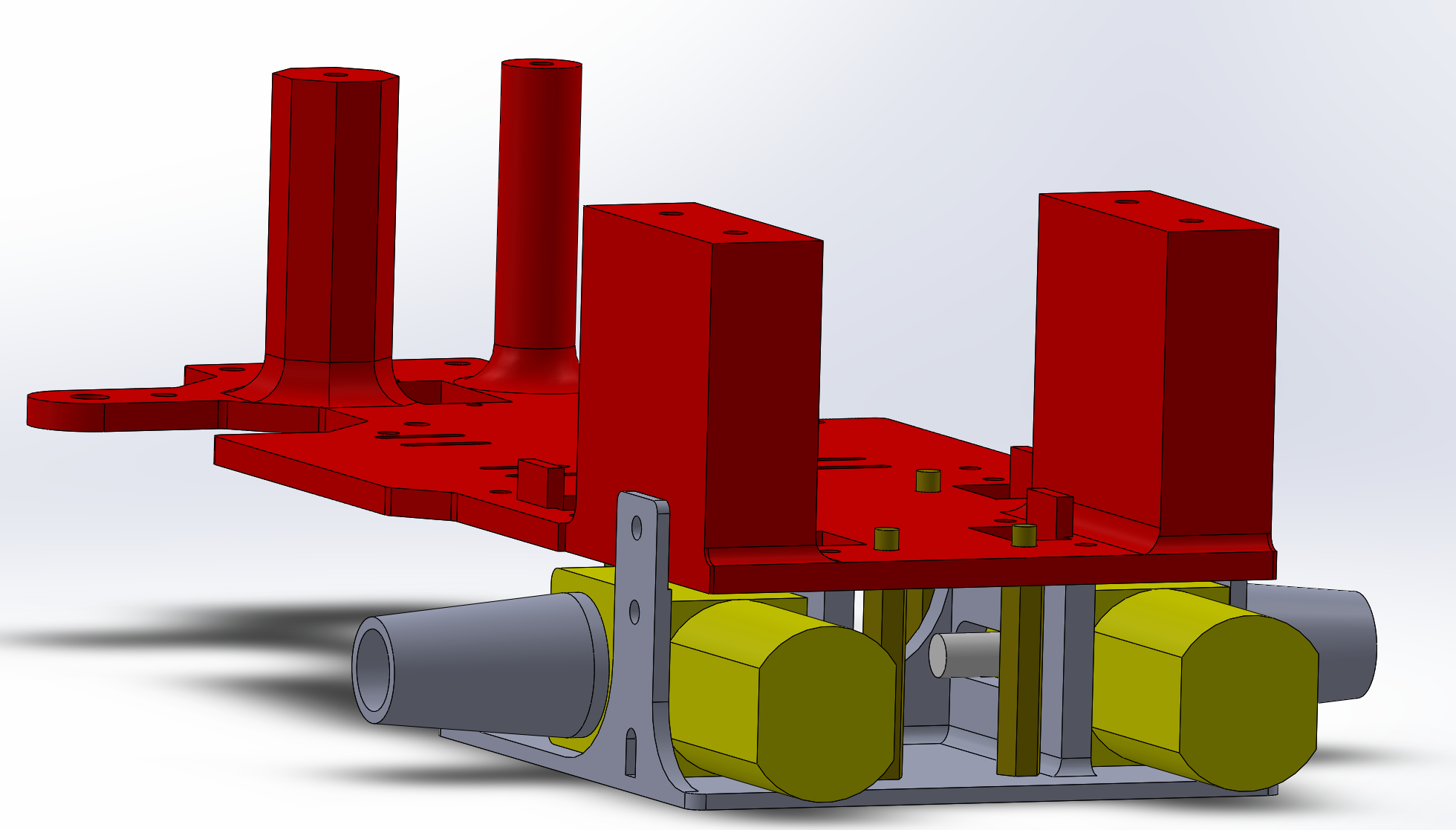
Rover Design and Fabrication

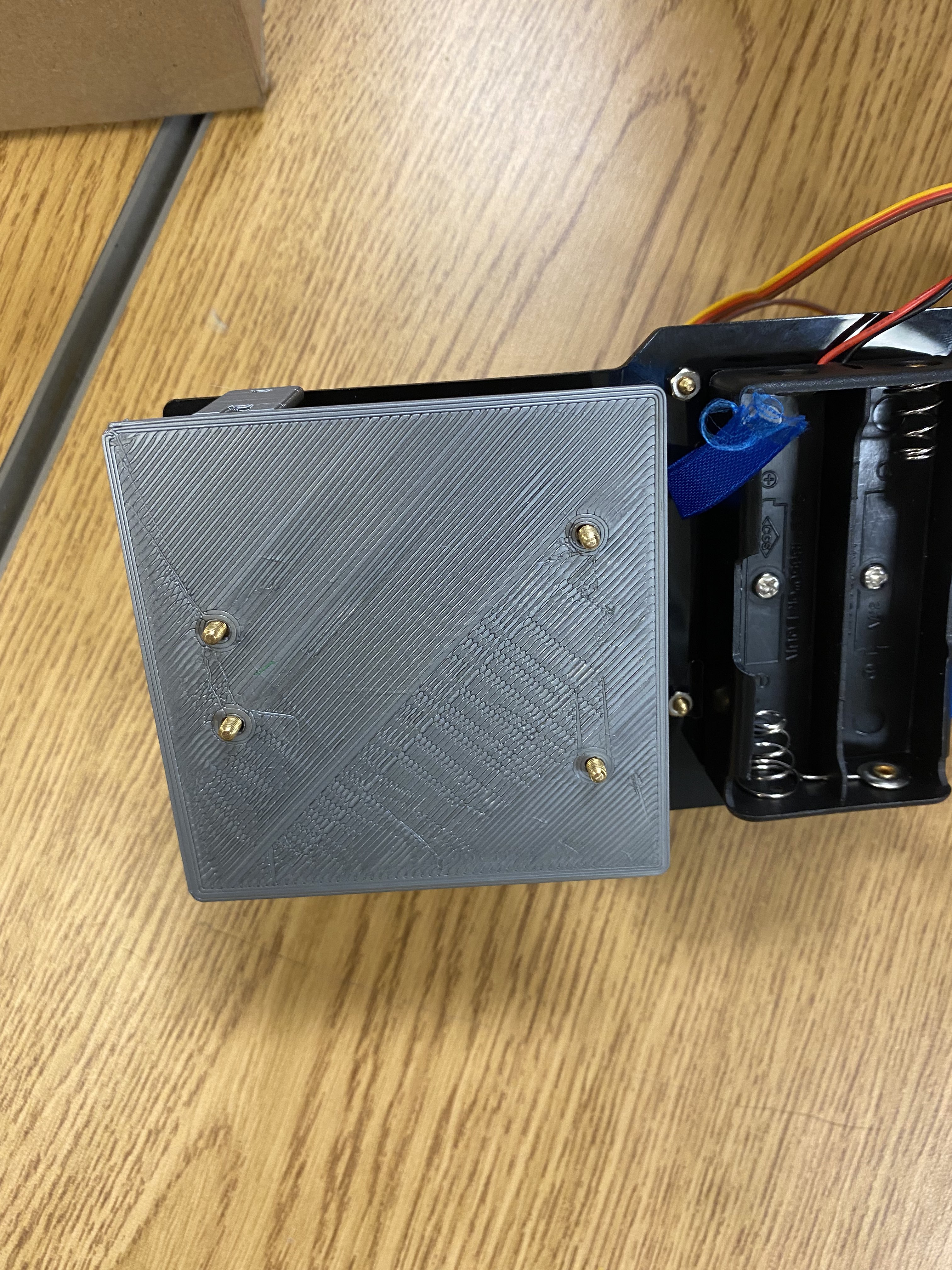
Partial assembly of the rover
Drop test simulation of the rover
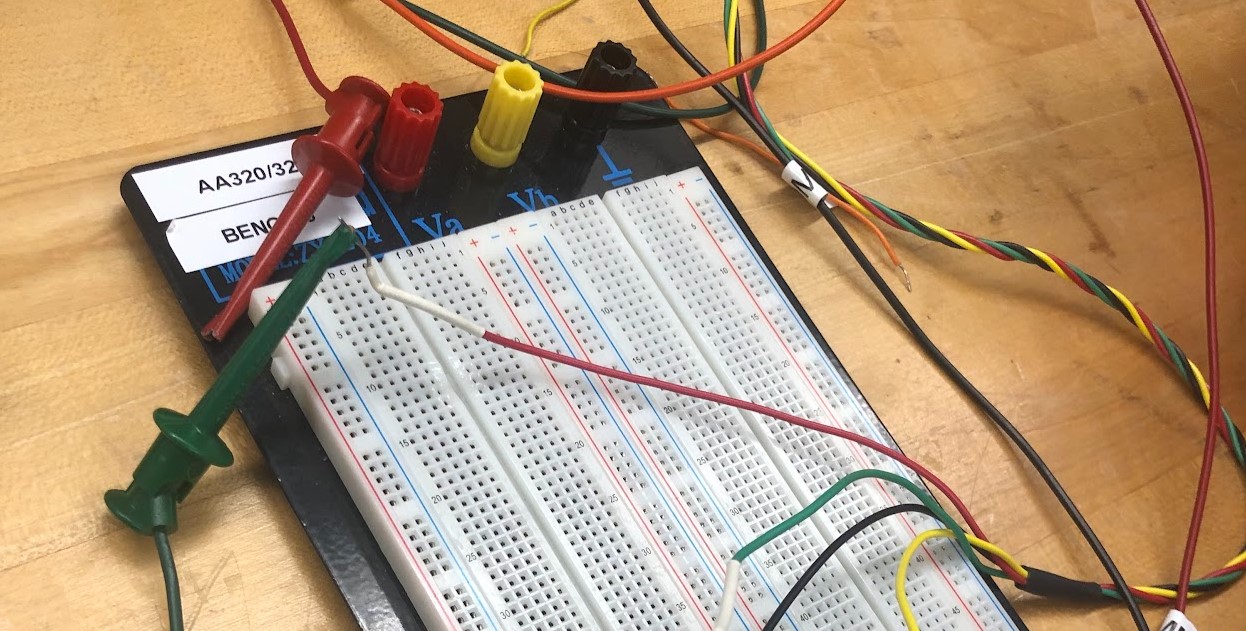
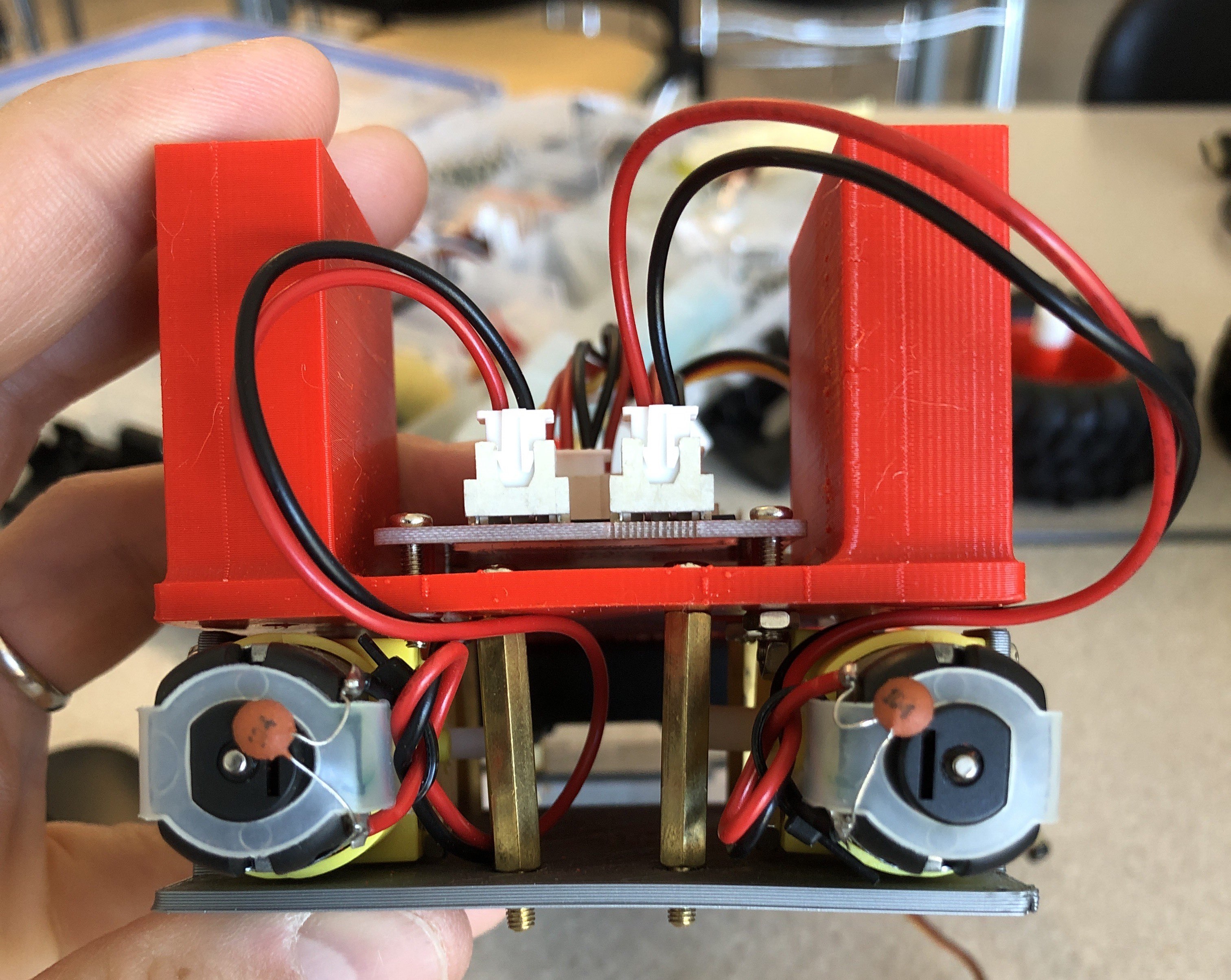
Electrical Systems Integration
Detailed electrical circuit design

Installation of camera system on the rover
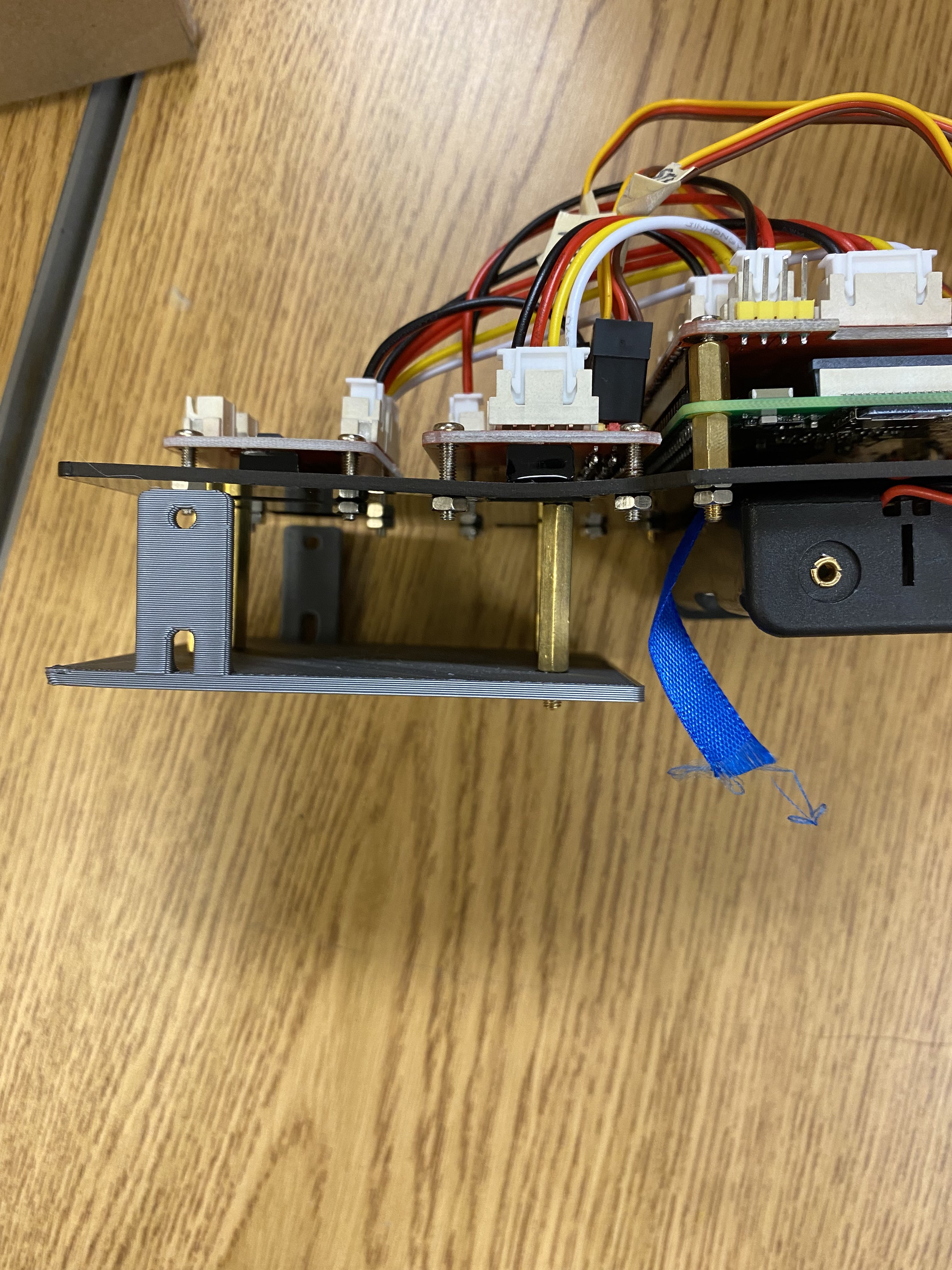
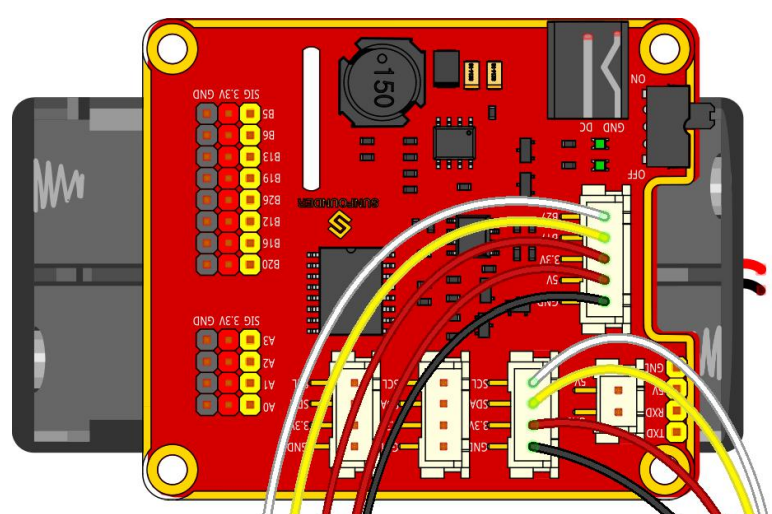
Integration of electrical components
Testing of electrical systems
Software Development and Control Systems
Camera Code:
from picamera import PiCamera
import time
camera = PiCamera()
time.sleep(2)
camera.capture("/home/pi/Pictures/img.jpg")
print("Image capture completed.")
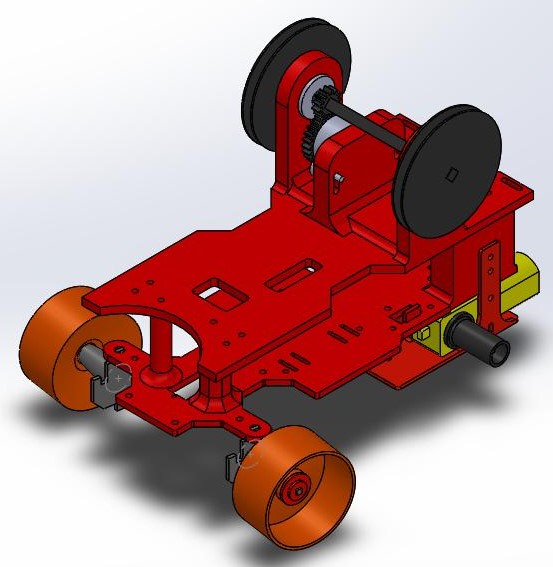
Mechanical Design and Structural Analysis
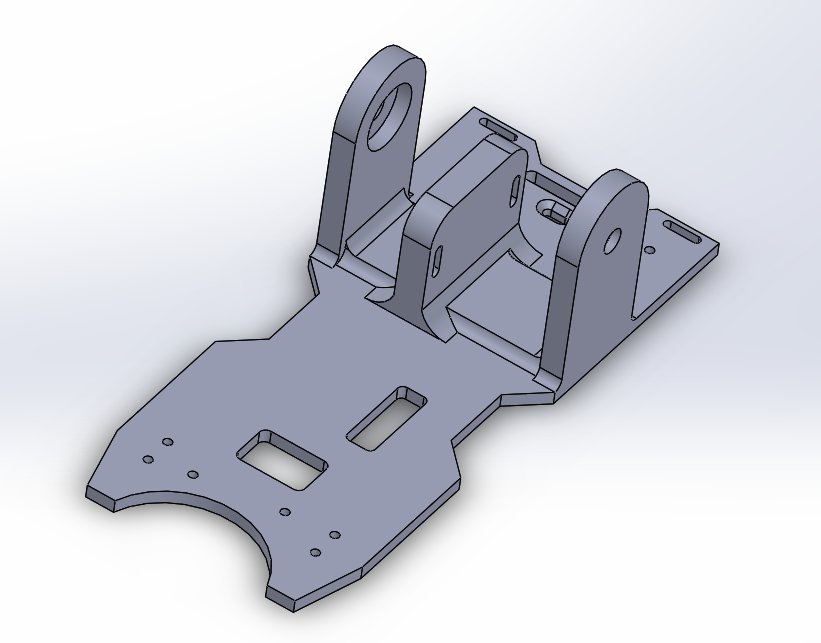
Design and simulation of rover frame
Final assembly of rover frame
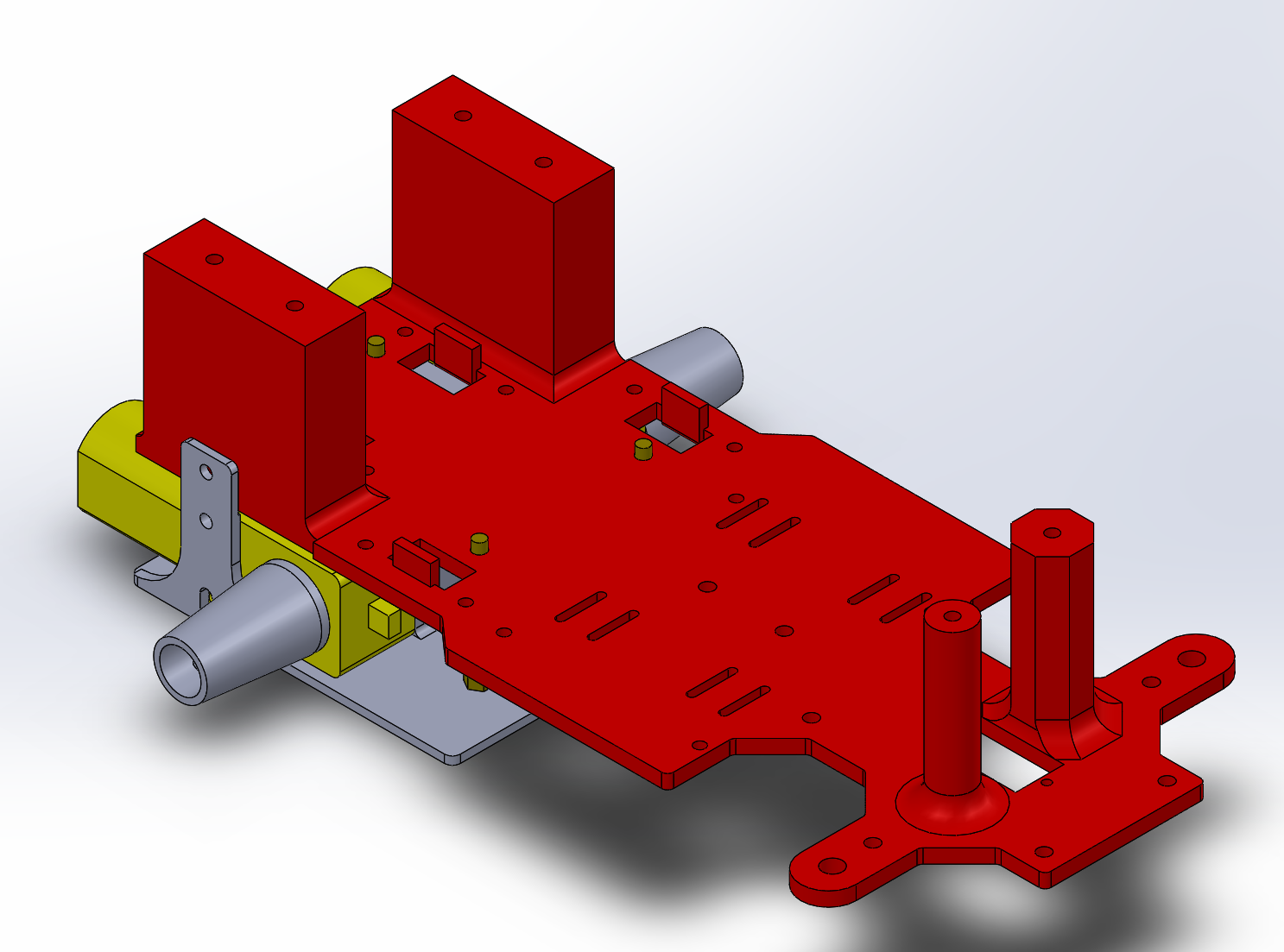
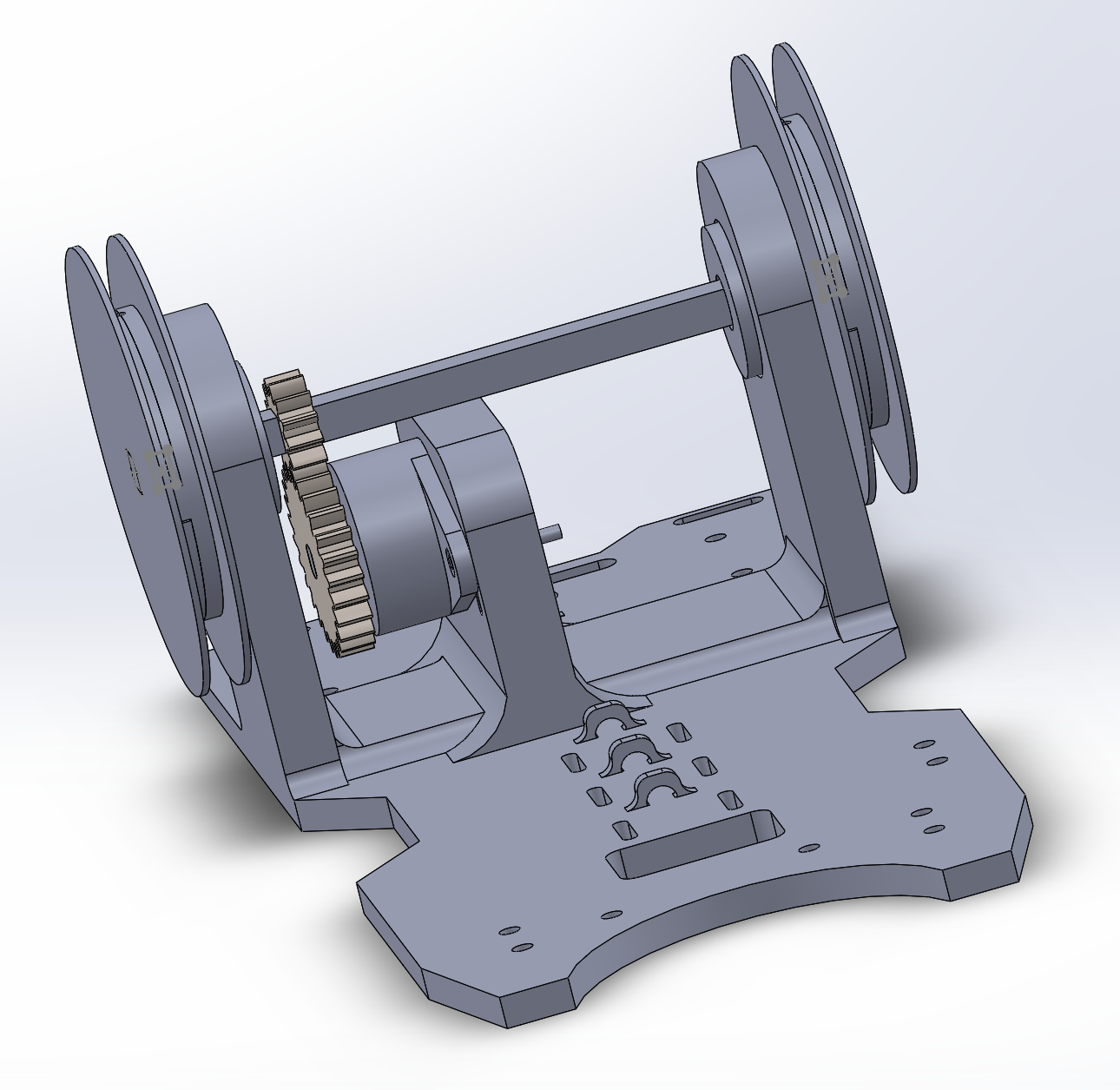
Design and simulation of rover chassis
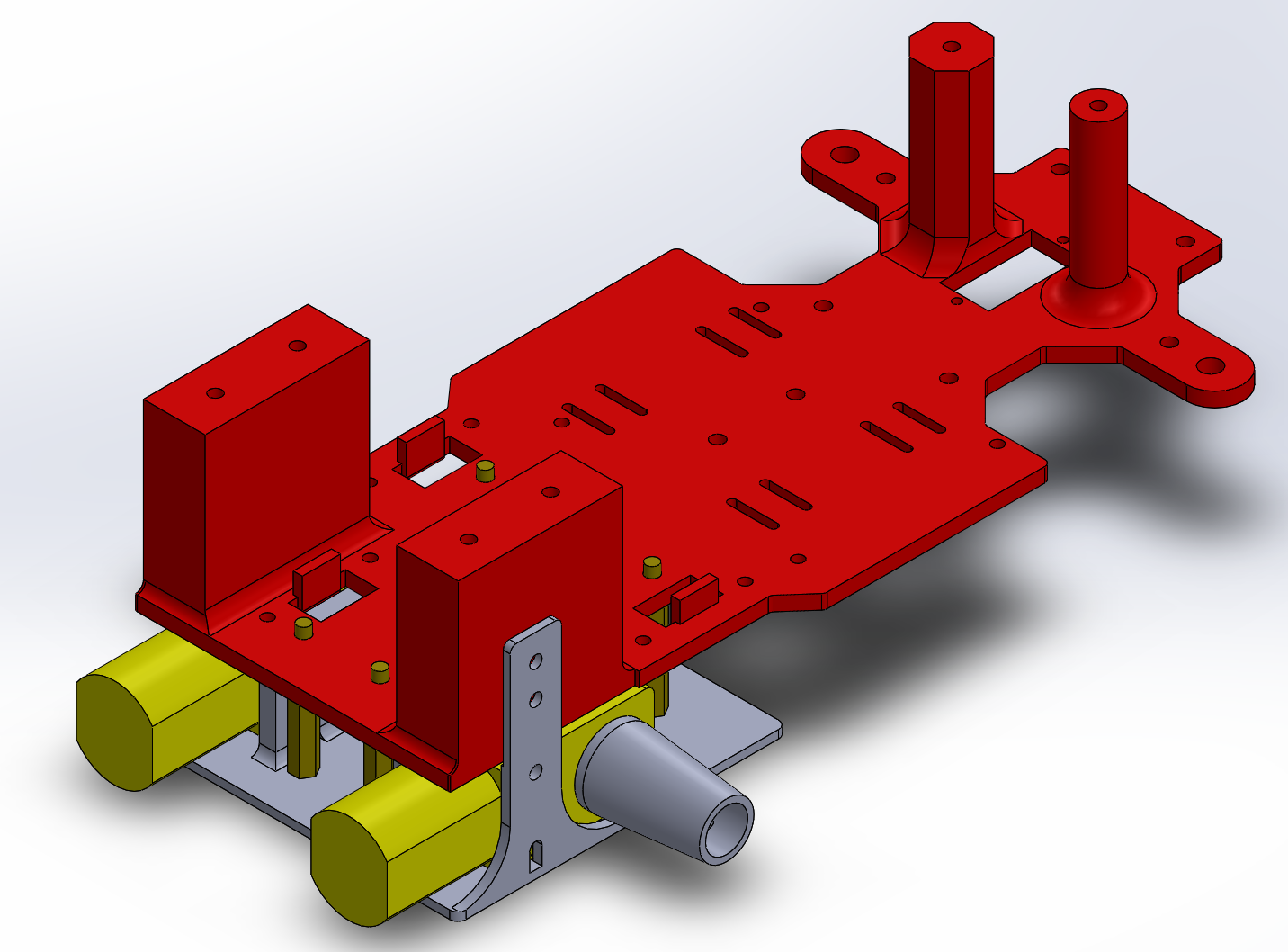
Integration of rover chassis components
Assembly process of rover chassis
Completed assembly of rover chassis
Testing phase of the rover
Design and simulation of rover frame